Your shopping cart is empty!
Random Products
-

Nibe LR230A-002 LI Actuator 5Nm 100/240VAC
- Regular price
- €120,00
- Regular price
-
- Sale price
- €120,00
- Unit price
- per
-

Ouman M41A15 valve actuator 3-leg controlled valve
- Regular price
- €50,00
- Regular price
-
- Sale price
- €50,00
- Unit price
- per
-

Ouman M41A15 valve actuator 3-leg controlled valve actuator 24 VAC
- Regular price
- €45,00
- Regular price
-
- Sale price
- €45,00
- Unit price
- per
-

5-ryhmän Belimo-VenttiilNiToimilaite Belimo 4 NM LM24/150
- Regular price
- €55,00
- Regular price
-
€70,00 - Sale price
- €55,00
- Unit price
- per
-

DANFOSS AME30 Actuator - VENTTIILIN TOIMILAITE
- Regular price
- €65,00
- Regular price
-
€130,00 - Sale price
- €65,00
- Unit price
- per
-

Eberle TSA 5.11 230 V Radiator Thermostat
- Regular price
- €150,00
- Regular price
-
- Sale price
- €150,00
- Unit price
- per
-

Bekomat KA13A10A0 Beko Condensate Drain 230VAC
- Regular price
- €150,00
- Regular price
-
- Sale price
- €150,00
- Unit price
- per
-

Ouman M31C150 3-point controlled Valve Motor
- Regular price
- €300,00
- Regular price
-
- Sale price
- €300,00
- Unit price
- per
-

Belimo FM24 Damper Actuator 24V 6W
- Regular price
- €80,00
- Regular price
-
- Sale price
- €80,00
- Unit price
- per
-

Electromotoric Valve actuator Siemens SAS81.00
- Regular price
- €130,00
- Regular price
-
- Sale price
- €130,00
- Unit price
- per
-

Parker Hannifin Servo Motor ACMn0220-4/1-6-GP55
- Regular price
- €170,00
- Regular price
-
- Sale price
- €170,00
- Unit price
- per
-

Sauter Actuator AVM105SF132 250N 24VAC/DC
- Regular price
- €45,00
- Regular price
-
- Sale price
- €45,00
- Unit price
- per
-

Ouman M31C150 3-point controlled valve motor 24 VAC
- Regular price
- €55,00
- Regular price
-
- Sale price
- €55,00
- Unit price
- per
-

Johnson Controls actuator damper M9116-GGA-1N
- Regular price
- €250,00
- Regular price
-
- Sale price
- €250,00
- Unit price
- per
-

Danfoss valve actuator AME 30 24V 3s/mm 450N HWS 082G3017
- Regular price
- €520,00
- Regular price
-
- Sale price
- €520,00
- Unit price
- per
-

Siemens GCA121.1E Electronic Damper Actuator
- Regular price
- €150,00
- Regular price
-
- Sale price
- €150,00
- Unit price
- per
-

Elero D-07381 Type Junior 2 Linear Actuator Linear Actuator
- Regular price
- €150,00
- Regular price
-
- Sale price
- €150,00
- Unit price
- per
-

Belimo AM24 Rotary actuators for butterfly valves
- Regular price
- €260,00
- Regular price
-
- Sale price
- €260,00
- Unit price
- per
-

Belimo AF24 spring return actuator
- Regular price
- €100,00
- Regular price
-
- Sale price
- €100,00
- Unit price
- per










































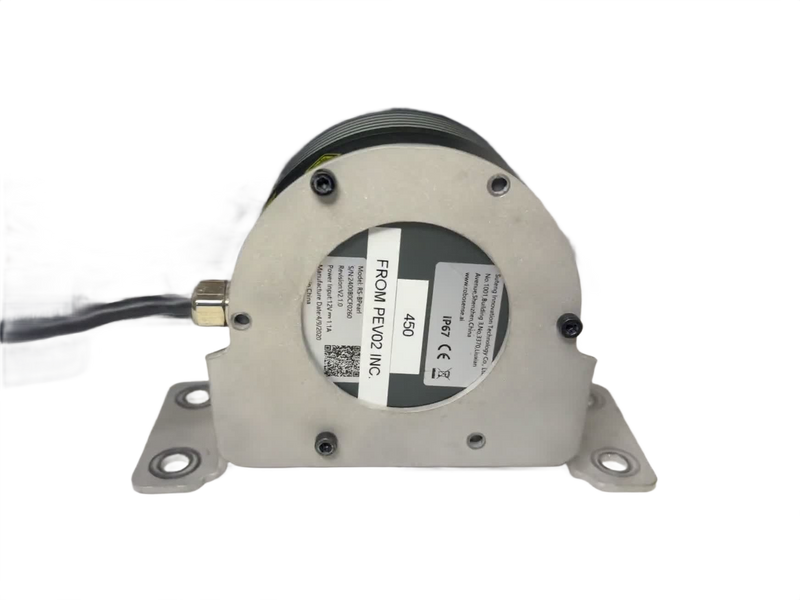
RoboSense RS-BPearl 32Ch 360° LiDAR Blind Spot Sensor IP67 | S/N 2400B0CF0260- with Interface Connection Box
- Regular price
- €650,00
- Regular price
-
- Sale price
- €650,00
- Unit price
- per
Couldn't load pickup availability
Share